ToF是飞行时间(Time of Flight)技术的缩写,即传感器发出经调制的近红外光(或可见光),遇物体后反射,传感器通过计算光线发射和反射时间差或相位差,来换算被拍摄景物的距离,以产生深度信息。再结合传统的相机拍摄,就能将物体的三维轮廓以不同颜色代表不同距离的地形图方式呈现出来。

三维数据化

避免2D识别错误

应用广泛

2D图:摄像头成像
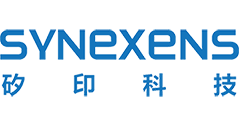
深度图: ToF图像
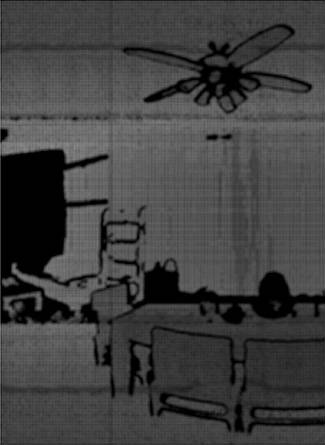
3D图:融合图像
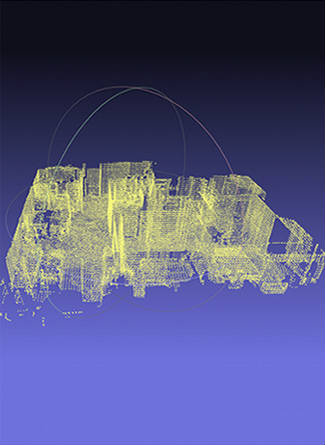
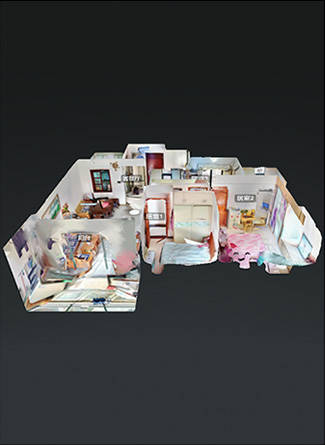
点云图:ToF图像3D展示
在很多场景下,都需要ToF技术:比如在机器人行业,为了让人类机器人更好地感知周围环境,进一步防止机器人与人、机器人与机器人的碰撞,我们需要添加一个或几个额外的ToF 相机到机器人的“双眼”,以准确描绘周围环境。这里的机器人可以狭义定义为人形机器人,也可以是广义的例如:扫地机器人、汽车、AGV、无人机等。消费电子领域也有对ToF技术的需求,例如iPhone的摄像头模组,其中采用了ToF技术,通过激光的方式快速判断拍摄对象与相机的距离,从而实现快速调整焦距,在暗光条件下也能快速拍出清晰的照片。
D-ToF芯片
M8001

i2001
R5001
iToF模组

CS40

CS30

CS20-P

CS20
开发板

R5001开发板